具身智能数据采集工厂接入刻行时空管理平台
背景
在具身智能领域,数据对于训练和优化智能体的行为、决策能力至关重要。当具身智能数据完成采集并整理好记录后,为了让这些数据能够精准地用于模型训练、算法优化等工作,需要对数据进行标注以便理解数据背后的含义,同时要经过审核保证数据的准确性和质量。刻行时空平台对此提供了一套完整的解决方案,兼容各种异构机器人,并支持多种数据的上传。
本文主要介绍如下方法:
- 如何在机器人本体端安装集成刻行时空的端侧软件,以满足机器人本体接入平台。
- 如何在机器人可视化的页面上进行数据采集与上传的操作。
前提条件
-
设备注册 参考如下官方链接:登录刻行时空,完成登录刻行时空部分 参考如下官方链接:设备注册
- 安装命令(一定要在代码的最后加 --beta,以下代码仅供参考示例,请务必在您的组织中复制安装指令后再添加 --bata。):
/bin/bash -c "$(curl -fsSL https://download.coscene.cn/coscout/v2/install.sh)" -s --mod="default" --org_slug="codemo" --server_url="https://openapi.coscene.cn" --coLink_endpoint="https://coordinator.coscene.cn/api" --coLink_network="fb899ea7-d71b-4cec-b531-0a5fb0015c61" --sn_file="/foo/bar/sn.txt" --sn_field="sn" --remove_config --beta - sn_file:表示为机器的序列号文件存放的地址,需要手动配置,同时确保文件存在。 sn_field:表示在上一个文件里表示机器序列号的字段,举个例子,我的机器人序列号文件的路径是 /root/robot/sn.txt, sn.txt文件里的内容是sn:123456, 那么这里我需要配置的是: --sn_file="/root/robot/sn.txt" --sn_field="sn"
- --beta 表示我们目前是在使用刻行时空提供的测试版。
- 安装命令(一定要在代码的最后加 --beta,以下代码仅供参考示例,请务必在您的组织中复制安装指令后再添加 --bata。):
-
安装 cobridge
- 下载 deb 包:cobridge 根据机器人本体的计算平台选择对应的 deb 安装包(注意科学上网进入 github 下载)
- 安装命令:
sudo dpkg -i ros-humble-cobridge_1.0.7-0focal_arm64.deb #以实际下载的 deb 文件为准。
-
对设备进行准入 登录平台后,在首页即可看到“前往组织管理”的按钮,参考文档支持设备准入
-
创建项目 登录平台后,在首页即可看到“新建项目”的按钮,参考文档支持新建项目
-
项目中添加采集设备 完成以上动作后,我们需要将机器人本体关联到我们的项目中,参考文档支持新建项目
准备与启动 ROS node
- 机器人本体上需要有可以提供 service 的数据录制节点,并且提供 开始录制 (如/start_record), 取消录制 (如/cancel_record), 结束录制 (如/stop_record)之类的服务供刻行时空调用。
- 启动 coBridge 前需 source 数据录制节点 的 workspace 环境变量。
- 示例启动脚本(请根据实际情况修改):
#!/bin/bash
set -e
source ~/cos_ws/devel/setup.bash # 请根据实际情况修改
roslaunch cobridge cobridge.launch &
sleep 3
roslaunch record_ctrl record.launch &
sleep 3
配置可视化布局
在进入实时可视化页面后,默认情况下是没有布局的,需要根据每个采集员的不同需求,将可视化面板添加至页面中。
若想快速开始,也可以联系刻行时空提供官方示例配置文件,按如下方法导入。

-
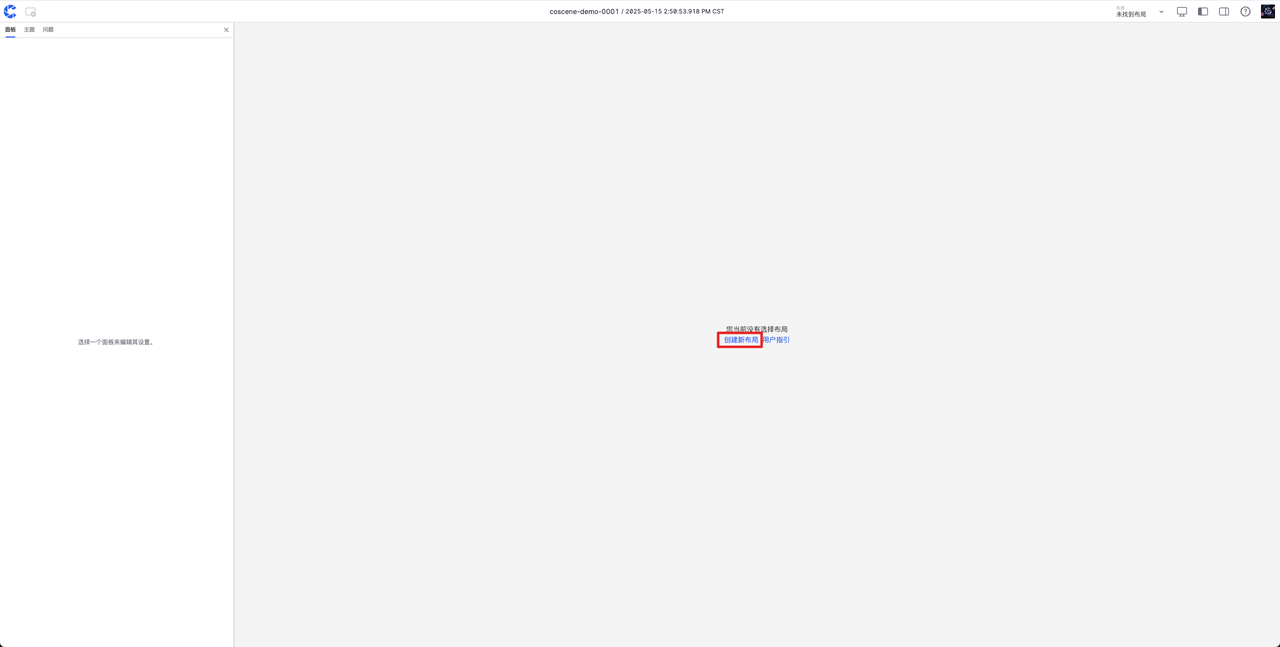
进入实时可视化页面(方法参考实时可视化),点击【创建新布局】。
-
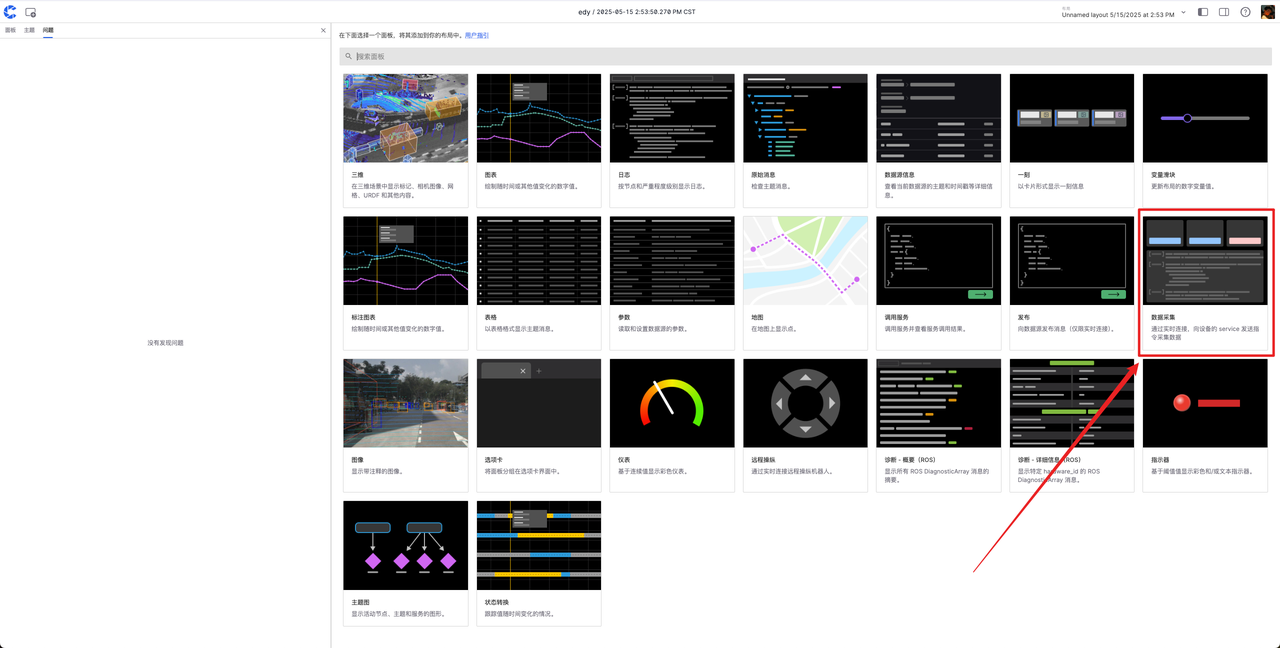
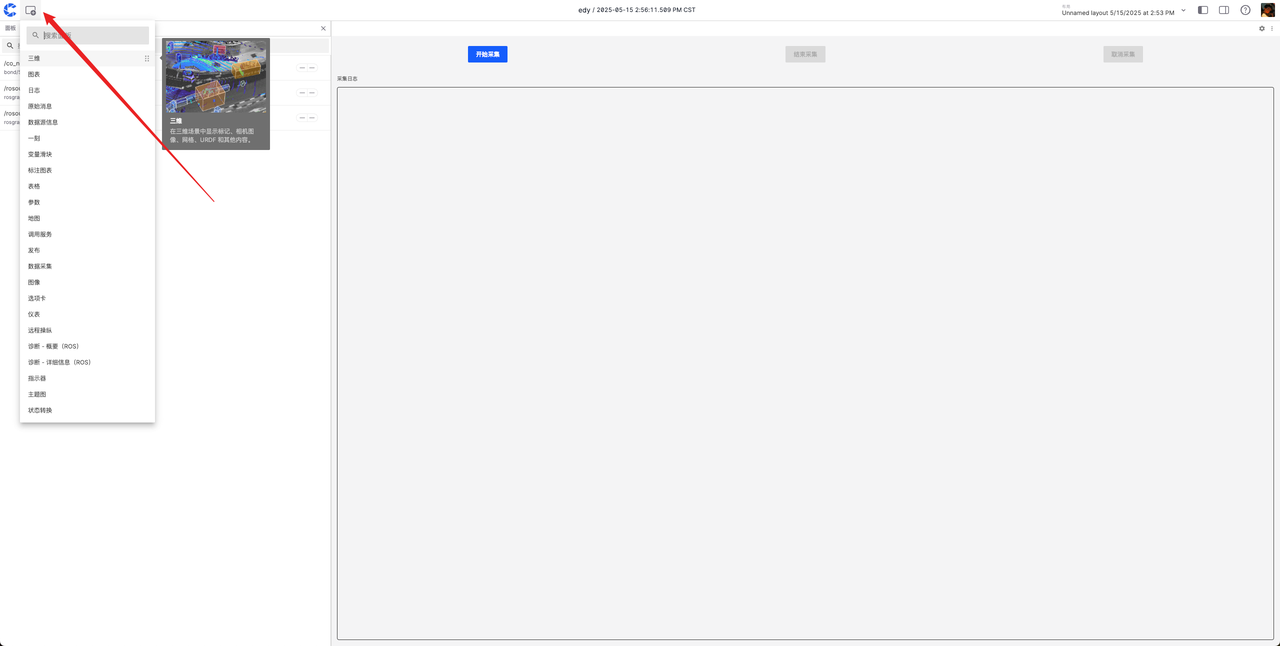
选择【数据采集】面板及其他所需面板(如三维、原始消息)。
-
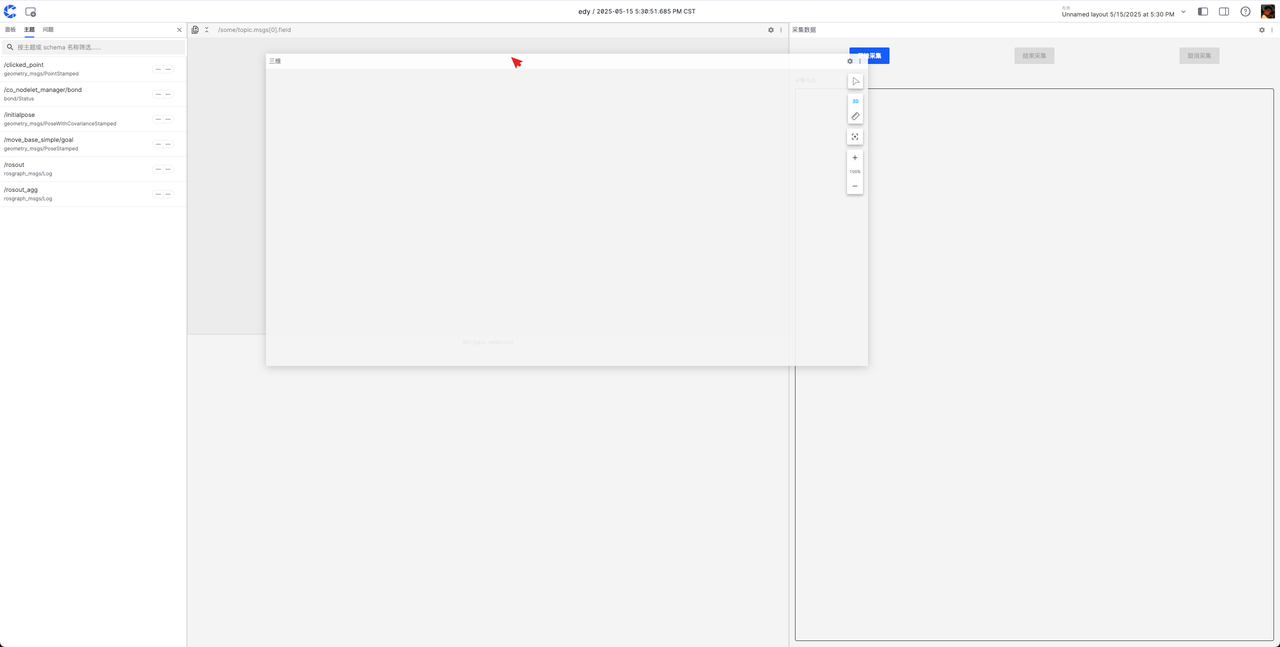
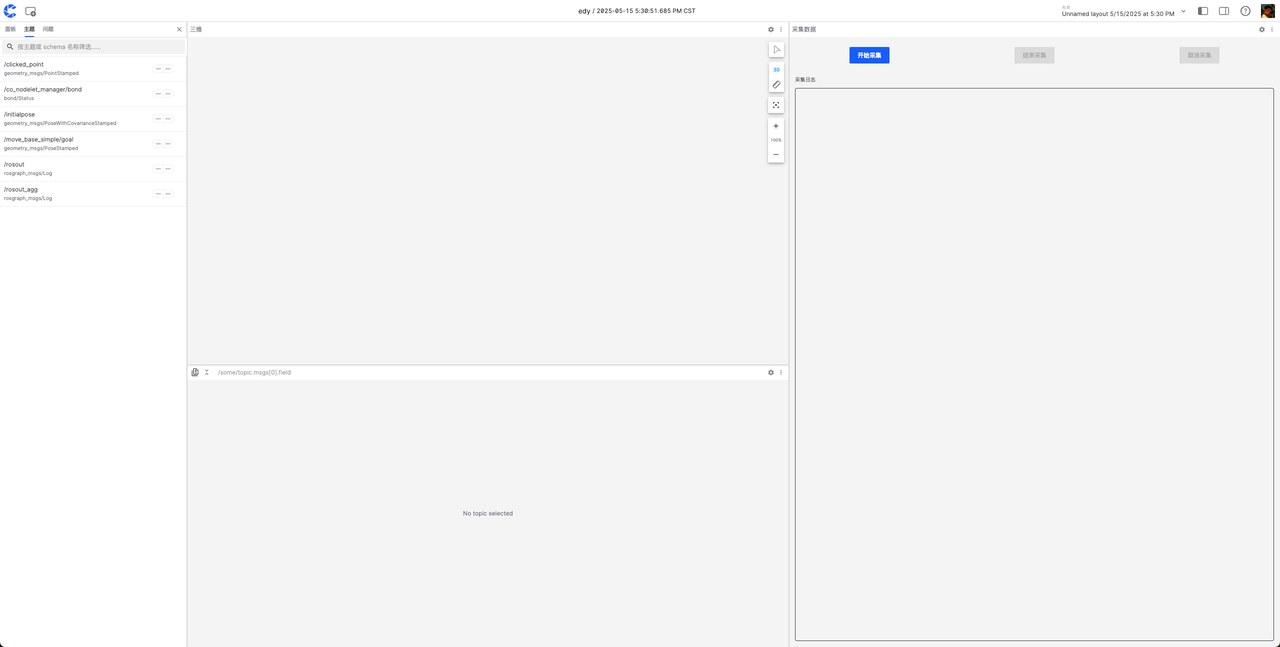
拖拽面板标题栏调整布局,拖动分界线调整大小。
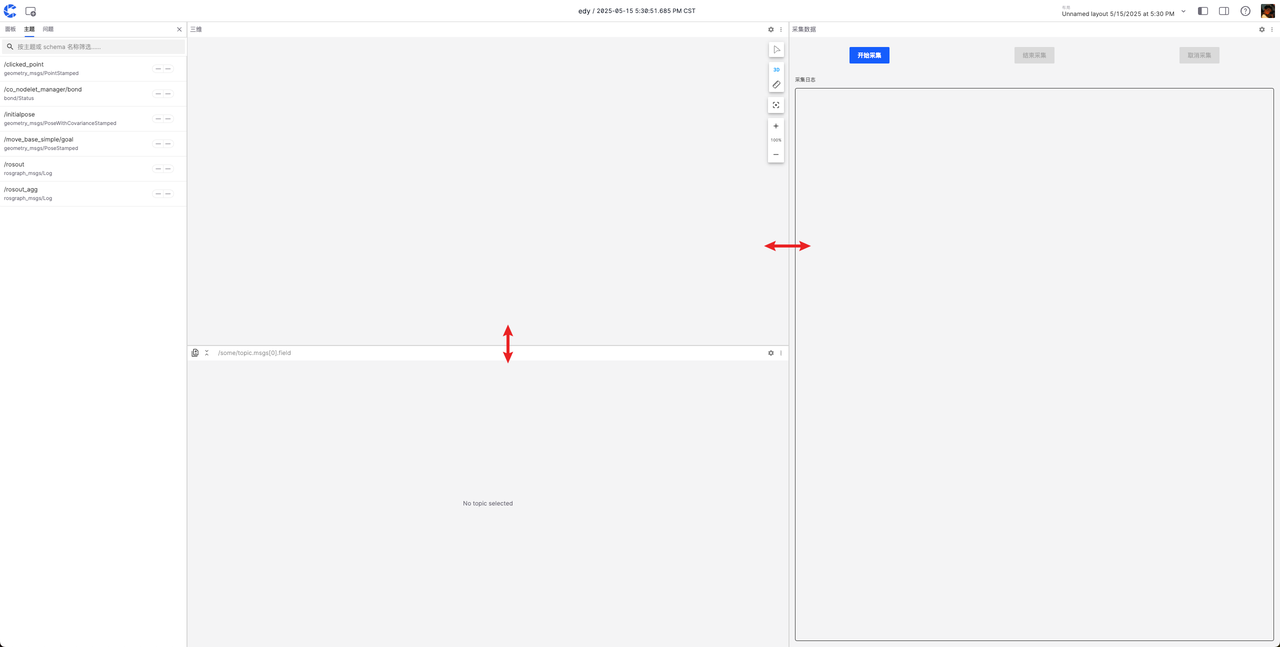 经过上述调整可以获得初步的可视化布局。
经过上述调整可以获得初步的可视化布局。
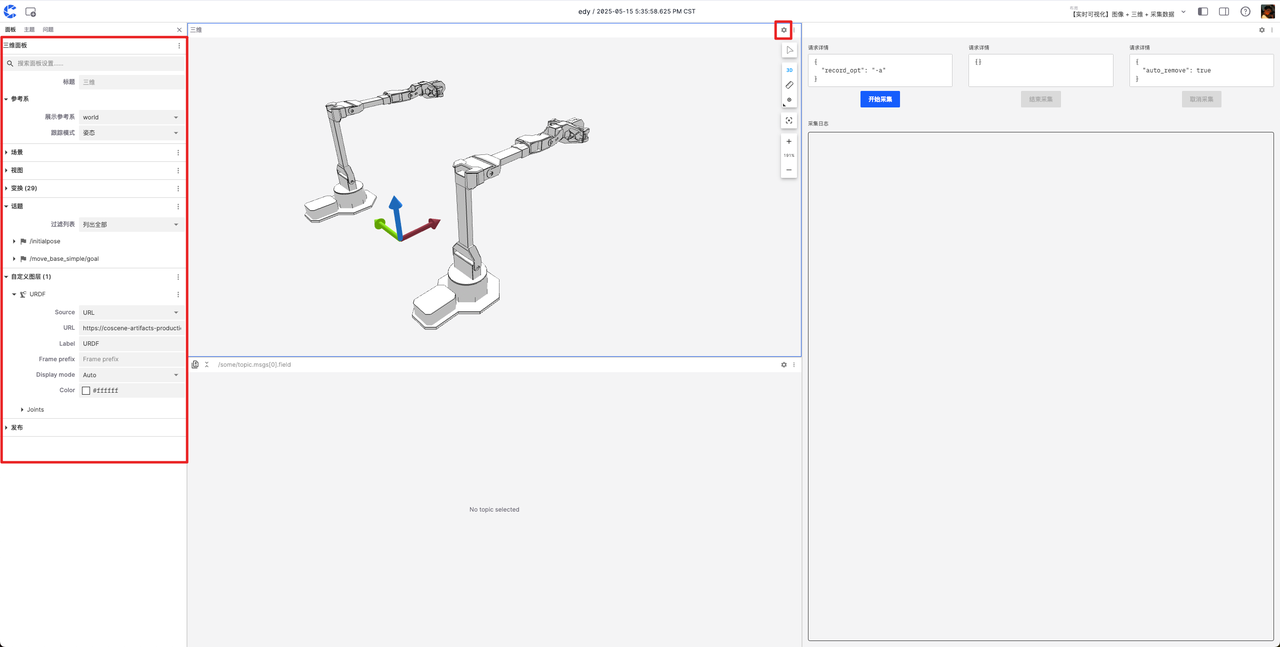
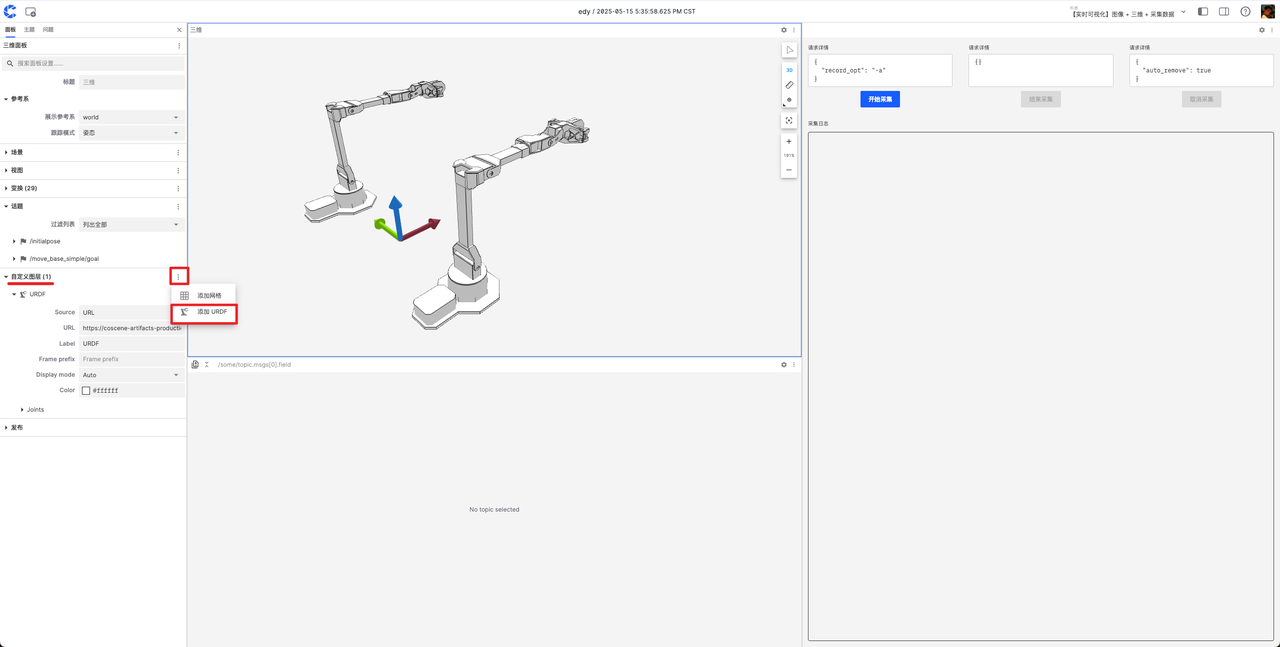
配置三维面板:
- 点击右上角【设置】,自定义图层可设置 URDF。
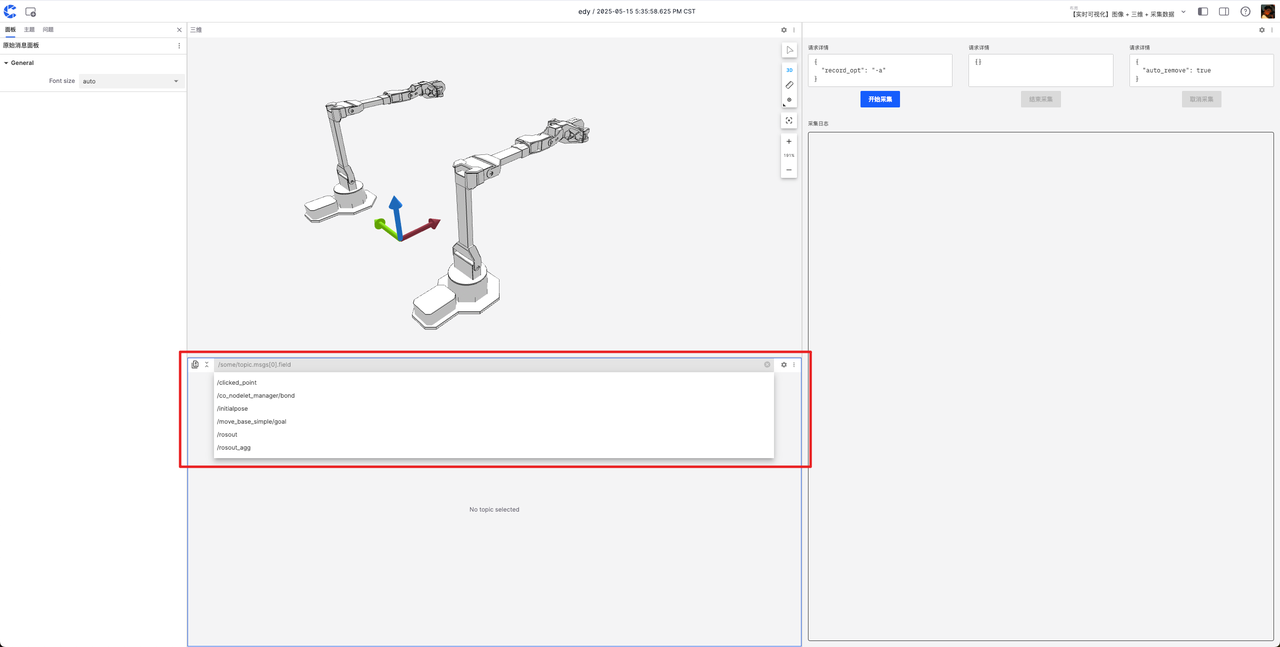
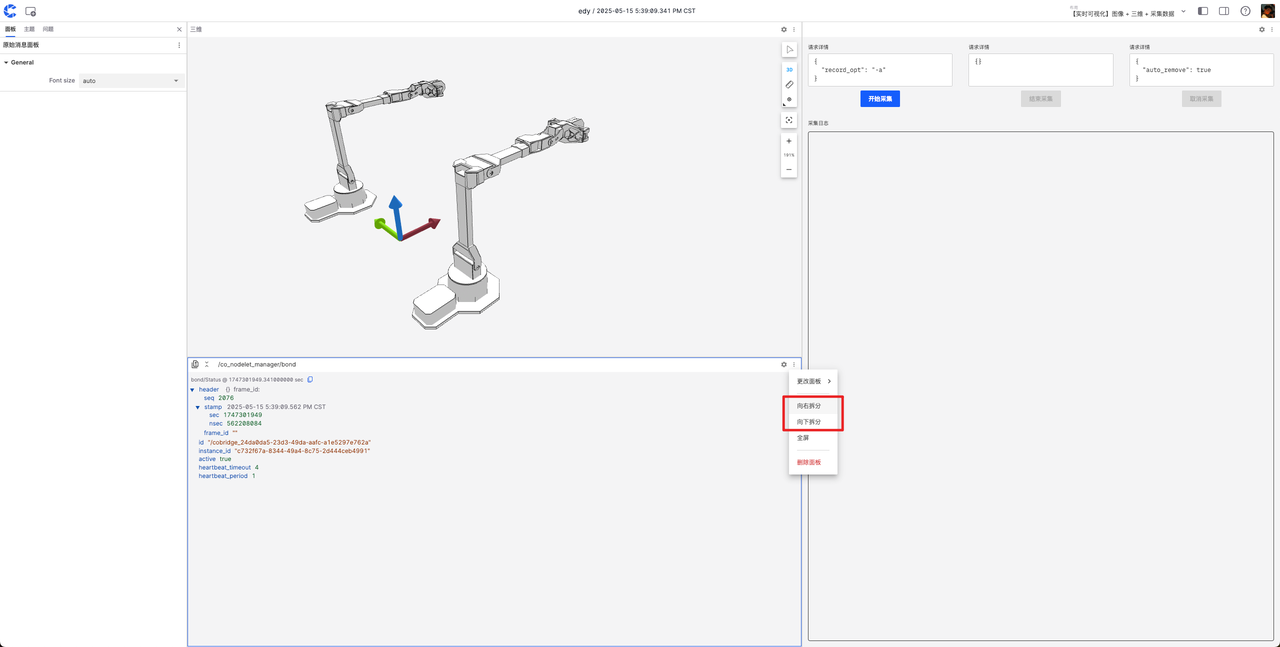
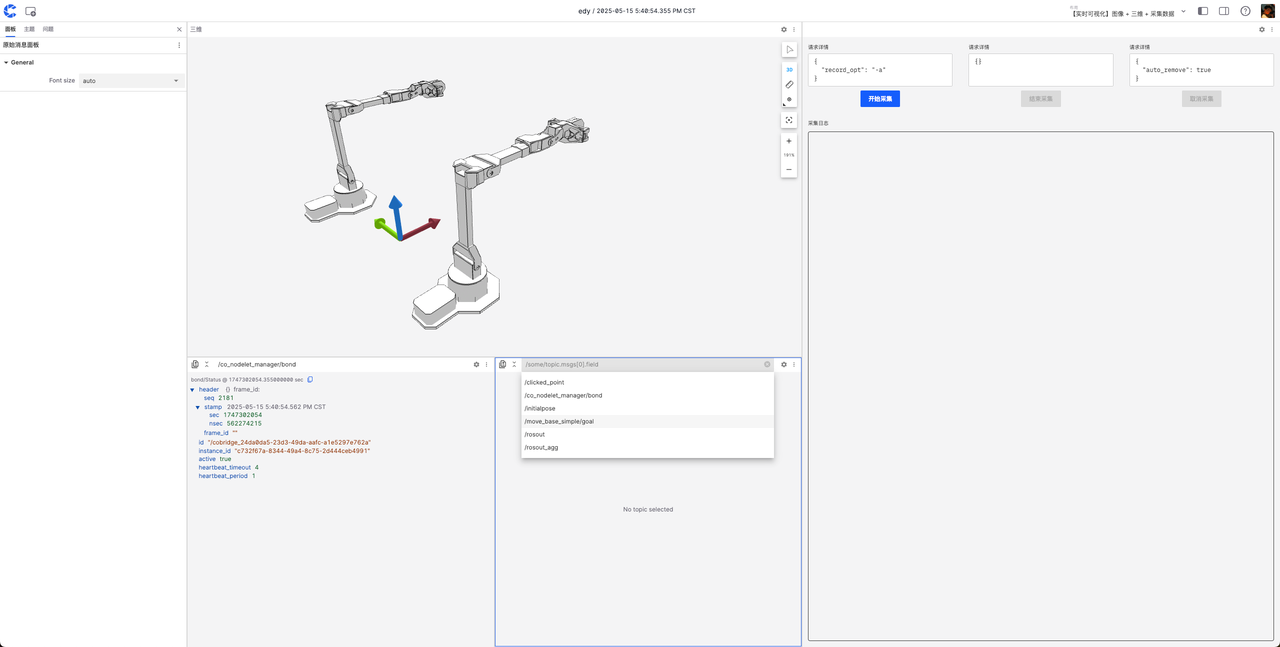
配置原始消息面板:
- 顶部选择关注的消息,可拆分/添加新面板。
配置采集数据面板:
- 选择数据采集面板后,设置数据保存项目、记录标签、服务名称(如/start_record、/cancel_record、/stop_record)。
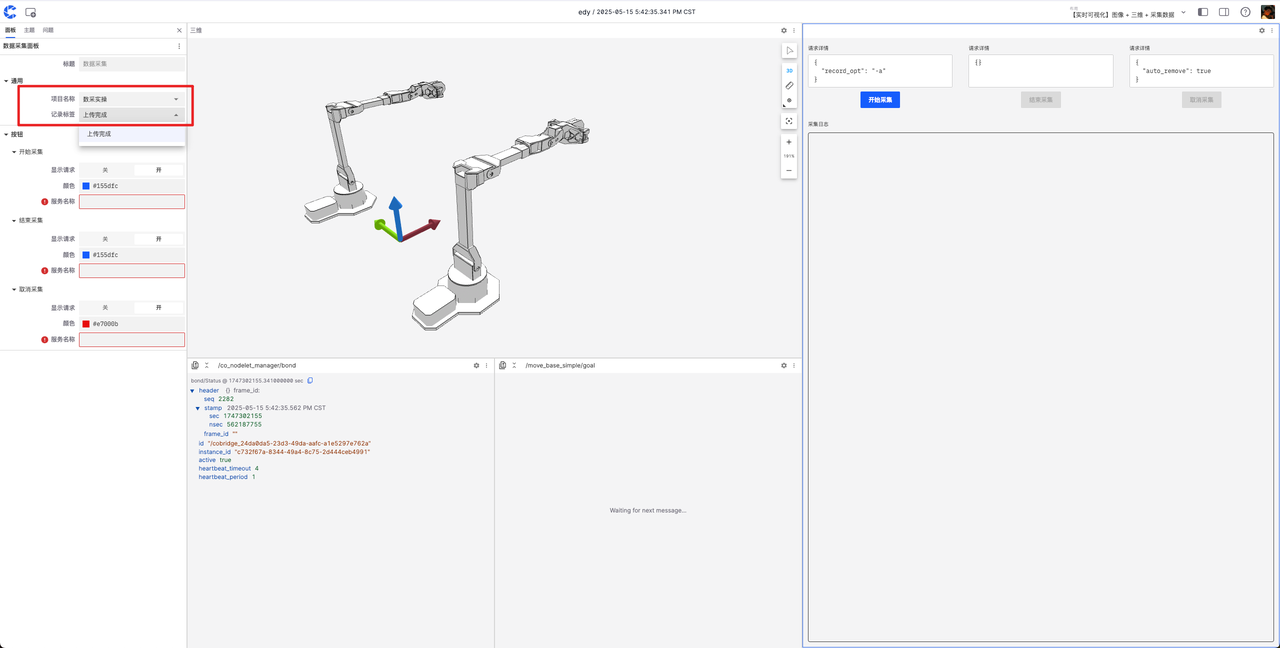
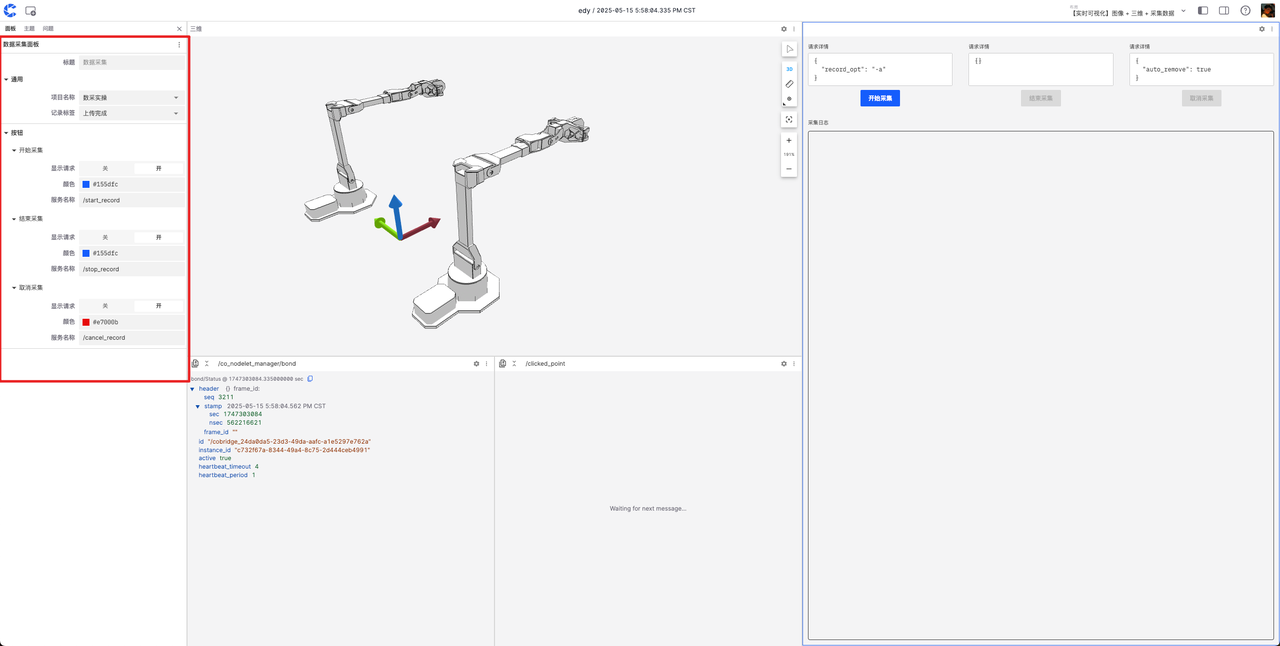
- 服务名称,需要根据机器人本体上运行的数据录制节点提供的服务名称为准!
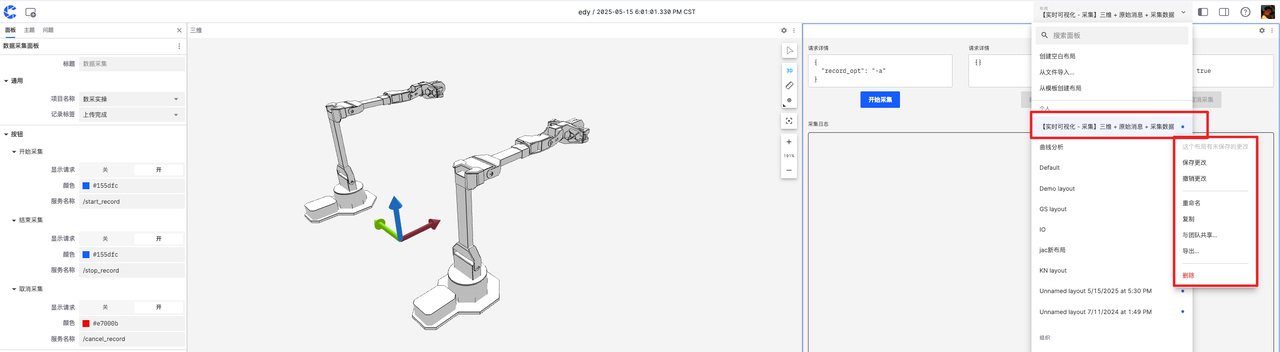
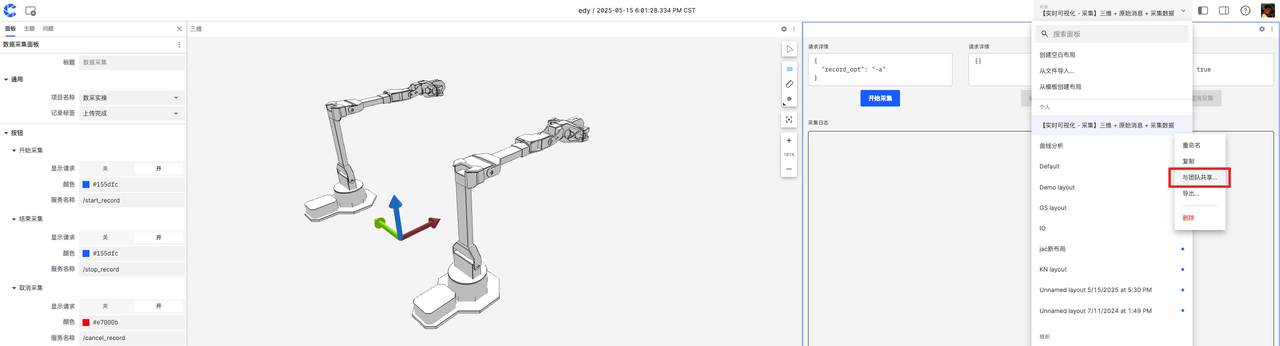
布局管理
配置完成后可保存、重命名、与团队共享。
采集数据流程
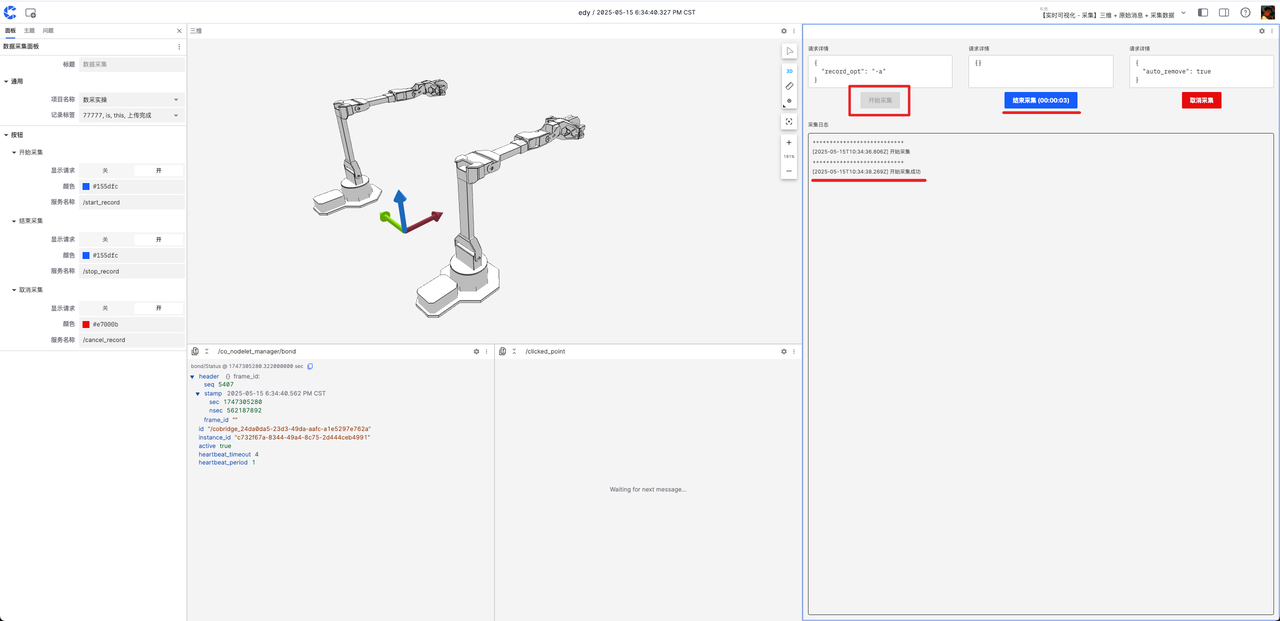
-
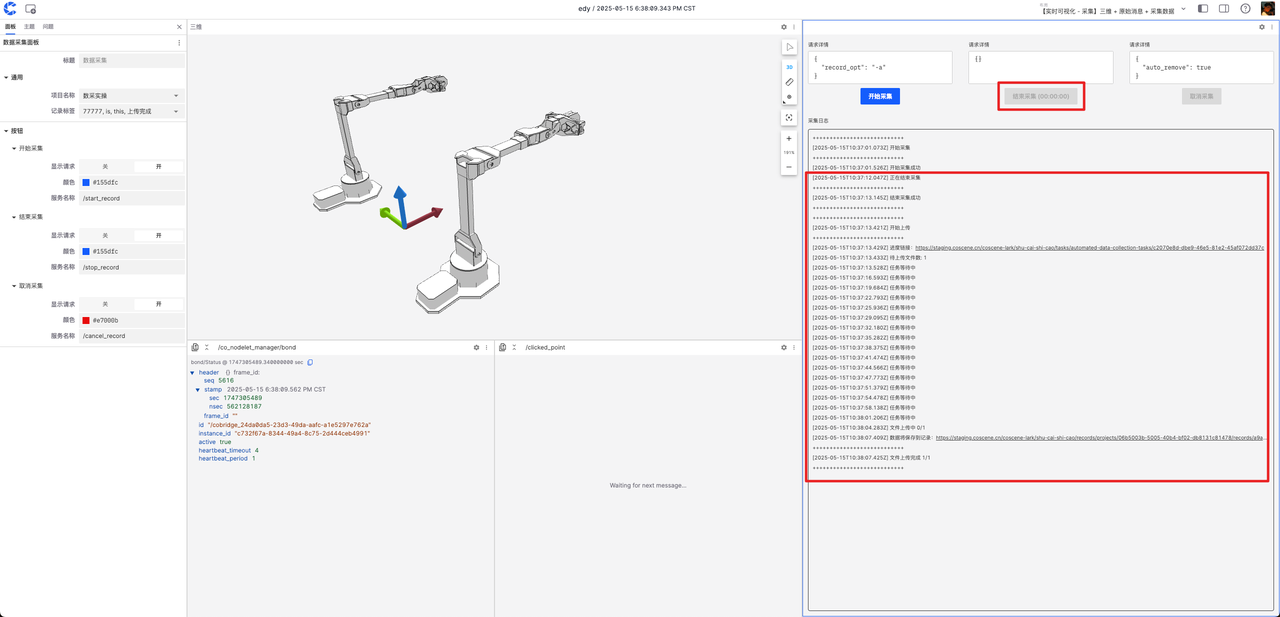
点击【开始采集】,日志提示“开始采集成功”即设备开始录制。(具体日志内容,以服务提供的反馈为准!)
-
采集员操作机器人完成目标任务。
-
任务完成后点击【结束采集】,日志提示“结束采集成功”并自动上传数据。(具体日志内容,以服务提供的反馈为准!)
- 刻行时空在这里提供了数据上传的日志提示:日志报出「结束采集成功」---「开始上传」---「文件上传中 X / N」---「文件上传完成」即完成了数据采集在采集日志中,可查看记录链接、上传文件进度。
- 刻行时空在这里提供了数据上传的日志提示:日志报出「结束采集成功」---「开始上传」---「文件上传中 X / N」---「文件上传完成」即完成了数据采集在采集日志中,可查看记录链接、上传文件进度。
-
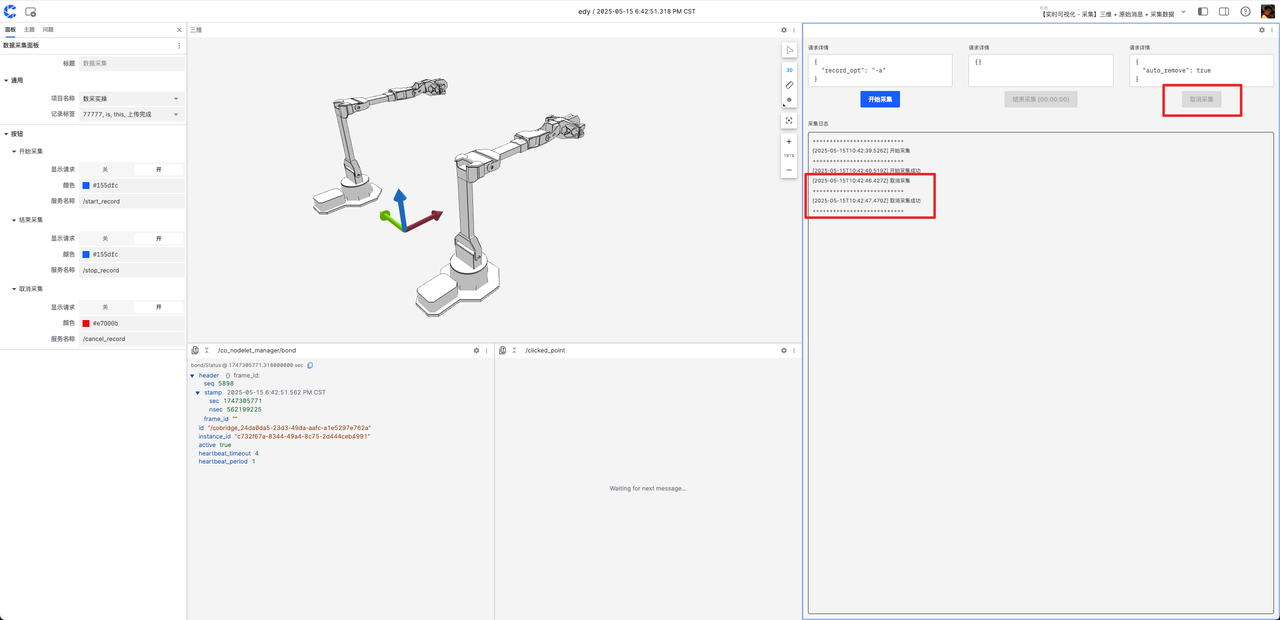
若误操作可点击【取消采集】丢弃数据。
-
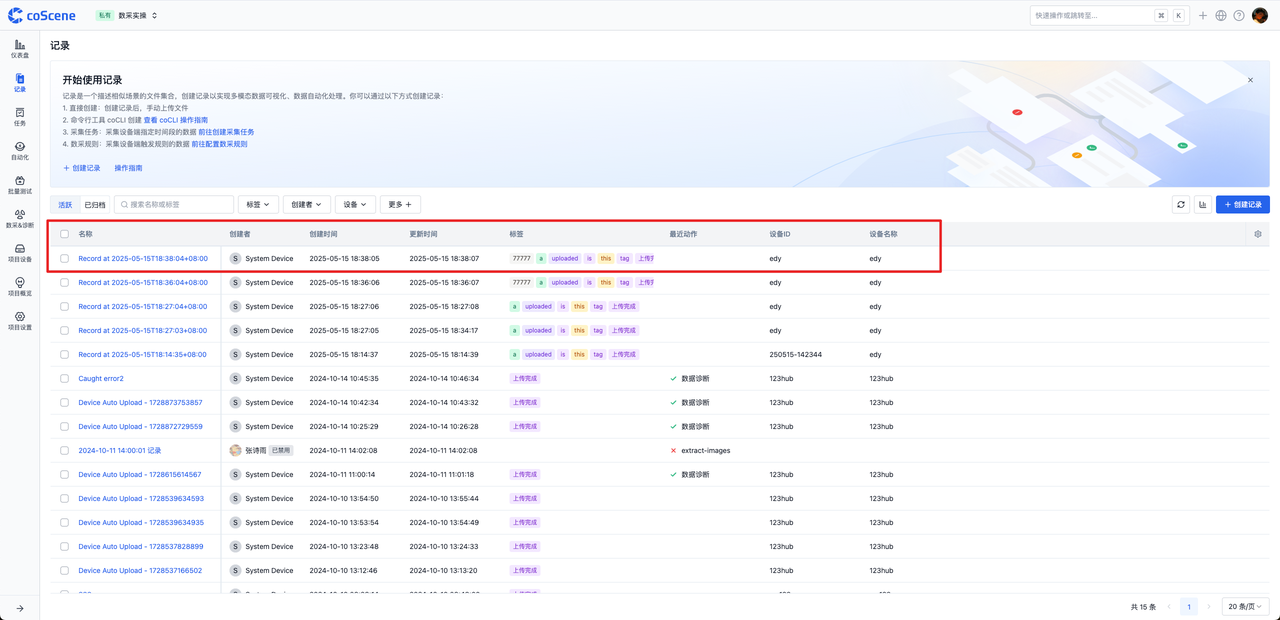
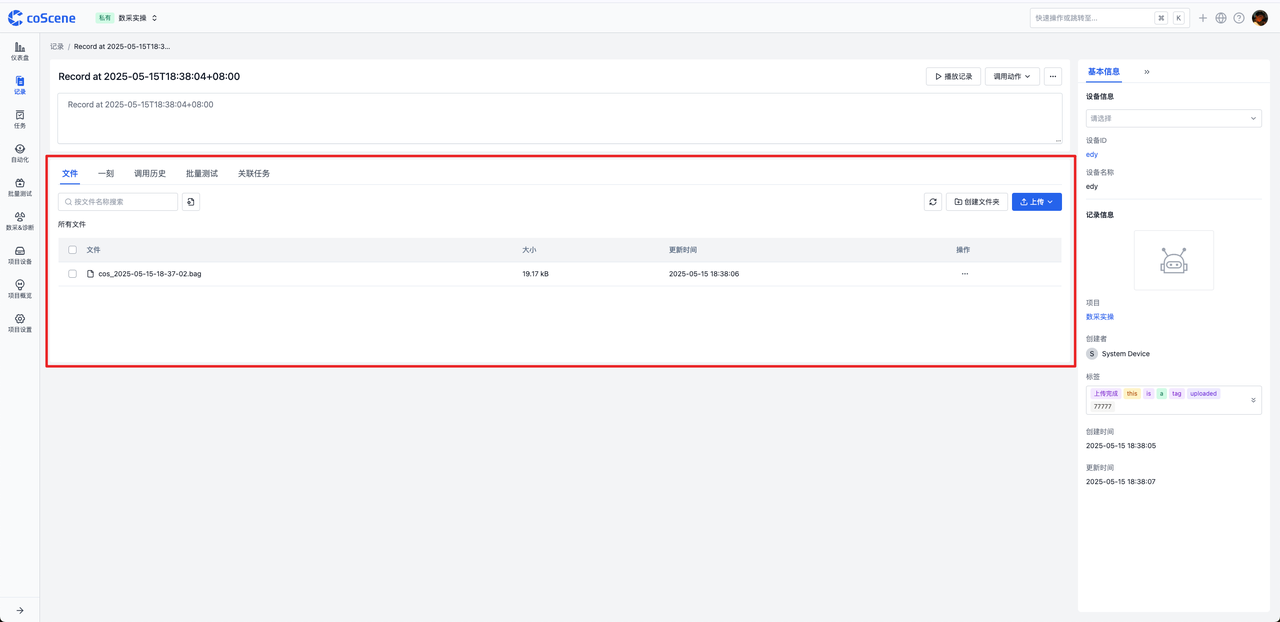
项目中可查看采集记录及数据。
常见问题解答
-
Q:采集数据面板的 service 可以自定义吗? A:可以,平台提供模板,用户可自定义。
-
Q:还有哪些面板支持实时可视化? A:所有面板均支持,只要机器人发出对应消息。
-
Q:还有哪些采集方式? A:平台支持按时间范围采集、自动发现采集等,详见相关文档。
以上为实时可视化采集数据的全部流程,如有疑问欢迎联系我们。